


SZ SENSING TECH Co., Ltd. (SENSING TECH) has officially launched its Stereo depth algorithm, sDepth. This cutting-edge neural network technology redefines stereo depth estimation, delivering highfidelity, highly reliable depth perception for robotics, industrial automation, AR/3D reconstruction, and beyond. The simultaneous release of the sDepth Software Development Kit (SDK) significantly lowers the barrier to integrating Stereo depth algorithms, helping more intelligent devices truly gain the ability to "understand the complex world."
△ sDepth multiscenario demo
Why reinventing Stereo depth perception?
Binocular stereo vision mimics human binocular ranging and offers inherent advantages for 3D perception. However, traditional algorithms rely heavily on texture features for matching. Faced with white walls, smooth floors, transparent glass, or low‑light environments, matching becomes difficult and depth output degrades significantly.
SENSING TECH's stereo depth algorithm (sDepth) uses neural networks to generate high‑fidelity depth maps directly from stereo image pairs, providing reliable depth estimation even under challenging conditions. Compared to conventional methods, it achieves substantial accuracy improvements in texture‑poor and dimly lit areas, making it an ideal choice for autonomous robots, augmented reality (AR), and other applications.
Core Technology of sDepth: Neural‑Network‑Driven Perception Innovation
The competitive edge of sDepth lies in its end‑to‑end neural network architecture for stereo depth estimation, which combines feature learning with multi‑strategy matching.

-
End‑to‑End Neural Network Architecture Generates high‑fidelity depth maps directly from stereo image pairs, effectively solving matching problems on textureless surfaces, repetitive textures, and under challenging lighting.
-
Neural Fusion Architecture Compensates for missing information via deep learning, achieving significant breakthroughs in accuracy for occluded and texture‑less regions.
-
Multi‑Strategy Fusion Mechanism
Dynamically integrates multiple matching strategies to ensure output consistency in complex environments.
-
Ultra‑Low Latency / Real‑Time Performance
End‑to‑end latency below 5 ms, perfectly supporting mainstream AI computing platforms such as NVIDIA Jetson AGX Orin and Thor.
sDepth SDK: Easier Depth Integration
To help customers quickly implement binocular depth projects, Sensyn Robotics has developed the sDepth Software Development Kit (SDK). It integrates core capabilities such as calibration parameter loading and depth map generation, covering both offline testing and real‑time capture scenarios, thereby drastically reducing the development threshold.
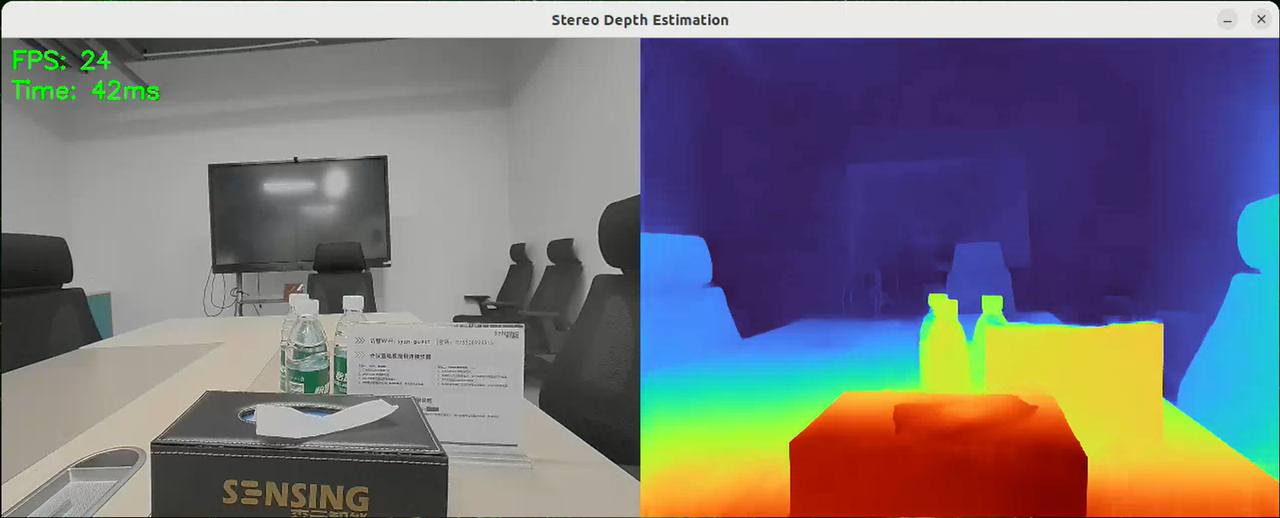
△ NVIDIA Jetson AGX Orin + S36 camera – indoor real‑time effect at 24 FPS
Key Features of the sDepth SDK
-
Offline & Real‑Time Dual Modes –Supports offline image tests and live camera data streams, enabling the full workflow from algorithm validation to product deployment.
-
Plug‑and‑Play Calibration Parameters – Load calibration parameters via configuration files, no hard‑coding required.
-
Multiple Display Modes – Switch display modes using keyboard shortcuts without affecting accuracy (visual changes only).
-
Multi‑Platform Optimization – Deeply optimized for platforms such as Jetson AGX Orin and Thor.
Broad Application Scenarios
The high‑fidelity depth perception of sDepth is unlocking value across multiple cutting‑edge fields:
-
Autonomous Robot Navigation – Service, cleaning, and inspection robots obtain reliable depth maps on low‑texture floors and under changing lighting, enabling stable obstacle avoidance and smooth navigation.
-
AGV Navigation & Warehouse Automation – In dark or low‑texture warehouses, sDepth outputs continuous and reliable depth information, helping AGVs identify traversable areas and avoid collisions.
-
Industrial Automation – Robotic grasping, workpiece positioning, and assembly guidance – even on reflective or texture‑sparse objects, sDepth delivers stable depth data for sub‑millimeter precision.
-
Augmented Reality (AR) – High‑quality, low‑latency depth maps allow virtual objects to blend precisely with the real environment, enhancing immersive AR experiences.

Open Empowerment: Giving Robots "Smart Eyes"
Amid the rising wave of embodied AI and spatial intelligence, breakthroughs in visual perception are a critical step toward enabling devices to truly "understand" the physical world. Binocular depth vision is rapidly becoming the core sensing modality for robots, autonomous driving, and industrial automation.
SENSING TECH Robotics' sDepth algorithm breaks through the traditional limitations of binocular stereo in low‑texture and low‑light scenarios. With its ultra‑low latency and flexible SDK deployment, it provides a solid vision foundation for the intelligent upgrade of multiple industries.
Going forward, SENSING TECH Robotics will continue to iterate the sDepth algorithm and SDK, support more computing platforms and depth modes, and work with industry partners to drive large‑scale adoption of stereo vision in the era of embodied intelligence.



